Distributed regional traffic management
The city of Utrecht was one of the first cities to experiment with multimodal and multi-objective regional traffic management on a large scale. In this DIT4TraM pilot, we test a distributed form of this regional approach. At least eight traffic control installations and three ramp metering installations will coordinate traffic management ‘locally’.

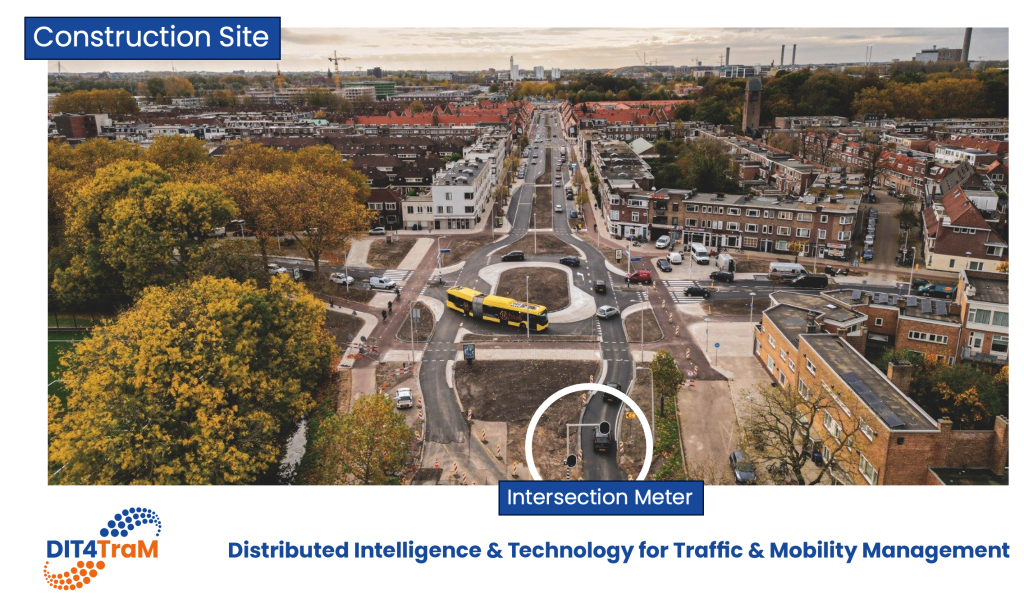
One of Utrecht’s main policy goals is to improve the sustainability and livability of the city. Dynamic traffic management contributes to this goal by controlling car traffic through the network with the Integrated Network Management (INM) system. However. The current INM system is car-centric and requires costly radar systems. The distributed methods within dit4tram solutions can improve the system; from car-centric to multimodal control, from manual bottleneck detection to intelligent automated network analysis, and by providing cost-effective alternatives for radar sensors. The pilot will test the dit4tram solutions on an urban corridor that is currently being renovated. The new road design provides more space for bicycles and green space. The INM system is also going to be deployed at the corridor and it will manage the new intersections to ensure that waiting times for public transport and bicycles are within policy norms.
To manage traffic flows at intersection traffic lights are used to optimize traffic flow in a city by preventing jam formation on main arterials and blockage of intersections due to spillback. Utrecht uses the modular INM system to achieve this. It consists of sensors, monitoring modules, control modules and actuators. The control modules are designed in a distributed manner with control algorithms at network, subnetwork and intersection level. Within the Utrecht-dit4tram-pilot new modules are being developed and tested. During the testing period the new modules will replace the old modules. By switching between modules on a weekly basis we can measure the effect of the dit4tram modules.
In the design phase of the corridor, a blueprint of the distributed architecture is made. Functions have been assigned to each road section and each intersection in a session with traffic engineers of the city. Expected bottlenecks and the locations of bus lines and bicycle crossings have led to a functional prioritization. This blueprint is the basis for the configuration of the INM system and for the monitoring plan. At several road section radar sensors will be installed. When the system is ready, queue estimates based on the radar allow detection of bottleneck and the assignment of functions throughout the network. The lessons learnt from setting up the blueprint are used in the dit4tram pilot; the pilot will provide insight in how we can automate the design phase of an INM system.
It is important to have accurate estimates of the queues at intersections. Currently, these estimates are provided by radar measurements. However, radars are expensive especially if you need them at many intersections. So, our goal is to investigate if Floating Car Data (FCD) can be used to estimate these queues instead of radar data. We test different models using FCD data from the city of Utrecht whereby radar data is used as the ground truth to validate the models. Ideally, this leads to new queue estimates with alternative data sources. However, we encounter difficulties in quality and timeliness of FCD. So our challenge is to enrich the data with (advanced) estimation and data fusion techniques.